به گزارش از «ایندیناکسپرس»، بسیاری از انواع مختلف حیوانات در سیاره ما دارای سیستم حرکتی با استفاده از پا هستند که به آنها اجازه میدهد در محیطهای مختلفی بدون دشواری زیادی حرکت کنند. مهندسان در تلاش برای تقلید از برخی از این رویکردهای حرکتی اغلب ناامید و سرخورده میشوند؛ چرا که در مییابند رباتهای پادار بطور شگفتآوری شکننده هستند.
حتی اگر یک پا از یک سیستم حرکتی رباتیک چند پا بر اثر فشار عملکردی بشکند، تاثیر جدی بر توانایی آن سیستمها خواهد داشت. همچنین اگر یک سیستم تعداد زیادی پا و مفصل داشته باشد، خود ربات نیازمند قدرت محاسباتی زیادی برای حرکت کردن است.


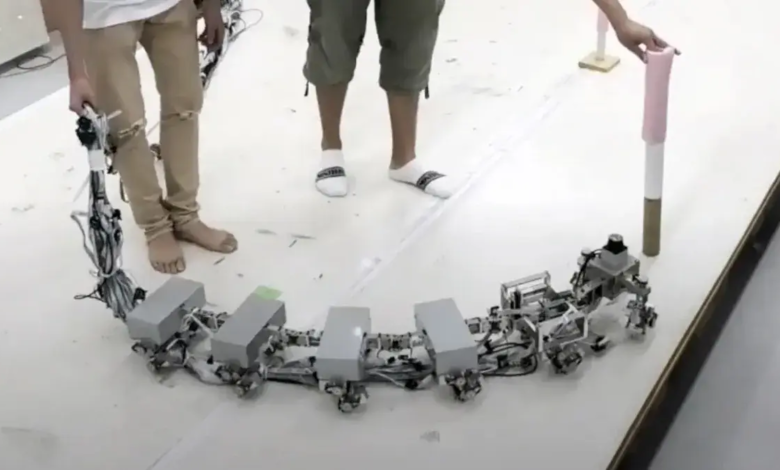
برای حل این مشکلات، محققان دانشگاه اوزاکا یک ربات 100 پا ابداع کردند که از یک بیثباتی طبیعی برای حرکت دادن ربات استفاده میکند.
در چنین موقعیتی، ربات در یک مسیر منحنی حرکت میکند و به سمت چپ یا راست متمایل میشود.
محققان دانشگاه اوزاکا میگویند برای حل این مشکل از توانایی حرکتی برخی حشرات چابک الهام گرفته اند. محققان با استفاده از این روش ناچار نیستند محور بدن ربات را بطور مستقیم هدایت کنند، بلکه تنها باید انعطاف را به درستی کنترل کنند.
این بدان معنا است که ربات نیازمند انرژی بسیار کمتری برای عملکرد خود است و همچنین توان محاسباتی بسیار کمتری برای تنظیم حرکت خود نیازمند است.